
常見(jiàn)問(wèn)題
機(jī)場(chǎng)跑道(dào)異物✘(wù)(FOD)監測系統
一(yī)、FOD——小(xiǎo)異物(wù),大(dà)麻煩
何謂FOD
FOD是(shì)Foreign Object Debri≠₩s的(de)縮寫,泛指可(kě)能(né✔δ↕ng)損傷航空(kōng)器(qì)或系統的(de)某種外 €♦¥(wài)來(lái)的(de)物(wù)質,常稱為π¥(wèi)跑道(dào)異物(wù)。
FOD的(de)種類相(xiàng)當多(duō),如÷π¥♦(rú)飛(fēi)機(jī)和(hé)發動機(jī)連接件(ji€ε₹àn)(螺帽、螺釘、墊圈、保險絲等)、機(jī)械工♠γΩ(gōng)具、飛(fēi)行(xíng•γ£π)物(wù)品(釘子(zǐ)、私人(rén)證件(jiàn)、鋼筆(₽Ωbǐ)、鉛筆(bǐ)等)、野生(shēng)動物(wù)、樹(shù)♠¶∞Ω葉、石頭和(hé)沙子(zǐ)、道(dào)面材料、木(mù)♣↑↔塊、塑料或聚乙烯材料、紙(zhǐ)制(zhì)品、運行(xíng)<☆區(qū)的(de)冰碴兒(ér)等等。
FOD危害非常嚴重
實驗和(hé)案例都(dōu)表明(mínα₩g),機(jī)場(chǎng)道(dào)面上(shàn→g)的(de)外(wài)來(lái)物(wù)可(kě)以很(∏®hěn)容易被吸入發動機(jī),導緻發動機(j≈ δī)失效。碎片也(yě)會(huì)堆積在機(jī)械裝置中, ≥影(yǐng)響起落架、襟翼等設備的(de)正常運行(xíng)。據♥®•¥保守估計(jì),每年(nián)全球因FOD造成的(de)損失至少(sσ&hǎo)在30-40億美(měi)元,2007年(ni¶♦¶£án)5月(yuè)至2008年(nián)5月(yuè),中國✔ (guó)民(mín)航共發生(shēng)4500多(duō)起FOD損傷輪£≥×胎的(de)事(shì)件(jiàn)。
外(wài)來(lái)物(wù)不(bù)僅會(huì)造¶λ ↕成巨大(dà)的(de)直接損失,還(hái)會(huì)造成γ₽¶航班延誤、中斷起飛(fēi)、關閉跑道(dào)等間(jiān)接損失,間(≠π<jiān)接損失至少(shǎo)為(wèi)直接"₩損失的(de)4倍。
目前,全球絕大(dà)多(duō)數(shù)的(de)機(jī)場(ch®ǎng)的(de)FOD監測仍然是(shì)靠人(rén)工(gōng)完成ε₹的(de),這(zhè)種方法不(bù)但(dàn)可(kě)靠γ"性差、效率低(dī),而且占用(yòng)了(le) §®寶貴的(de)跑道(dào)使用(yòng)時(shí)間(j±♠iān),這(zhè)又(yòu)是(shì)一(yī)筆☆σ(bǐ)經濟損失。
二、FOD引發一(yī)場(chǎng)空(kōng)難,★ ☆FOD檢測系統的(de)研發從(cóng)此開(kāi)始
2000年(nián)7月(yuè)25日(rì)法航協和(hé)飛(fēi★¥π)機(jī)因FOD失事(shì),造成機(jī)上(shàn✘ §g)109人(rén),地(dì)面4人(r'•÷'én),共113人(rén)遇難。

事(shì)件(jiàn)回放(fàng):協和(hé)飛(fēi)機(jī)的(de)上(shàng)一(₹™∑←yī)個(gè)航班是(shì)美(měi)國(guó)大(dà)陸航空¥£§(kōng)公司DC10飛(fēi)機(↑∞ jī),該飛(fēi)機(jī)在跑道(dào)上(s₽'hàng)掉下(xià)來(lái)一(yī∏>→∏)塊43cm金(jīn)屬片,它紮破了(©"☆σle)随後起飛(fēi)的(de)協和(hé)飛(f₹βēi)機(jī)輪胎,輪胎爆破産生(shēng)的(de)碎片α≤擊中了(le)一(yī)個(gè)或多(duō)個( γgè)油箱,飛(fēi)機(jī)左機(jī)≤✔σ翼起火(huǒ)并很(hěn)快(kuài)φεδ墜毀,這(zhè)個(gè)過程不(bù)到(dào)≤♥1分(fēn)30秒(miǎo)。此次事(shì)件(jiàn£)的(de)後果造成協和(hé)飛(fēi)機(jī)在γ₩2003年(nián)10月(yuè)24日(r↑γ→™ì)全部退役。
這(zhè)場(chǎng)因FOD引發的(de)空(kōng)難将F₹÷OD自(zì)動監測系統的(de)研究提上(shàng)了(le)日(r≠ ì)程。
英國(guó)QinetiQ公司最先研發出【T ↑¥arsier(眼鏡猴)Foreign Objecγαt Debris radardetection syst♠ε₽₽em】,眼鏡猴系統先在英國(guó)及美(měi)國₽ (guó)德州空(kōng)軍基地(dì)≥♥使用(yòng)。2006年(nián)1<>™"2月(yuè)6日(rì),溫哥(gē)華機(jī)場(chǎn"↓g)宣布啓用(yòng)了(le)這(zhè)¶→套跑道(dào)異物(wù)雷達偵測系統。成為(wèi)全→✘₽世界第一(yī)個(gè)采用(yòng)FOβ→✔>D檢測系統的(de)民(mín)航機(jī)場(chǎng)"♦。溫哥(gē)華機(jī)場(chǎng)裝備→ 後的(de)3年(nián)裡(lǐ),倫敦希斯洛£ '國(guó)際機(jī)場(chǎng)、美(měi)國(guóεφ✘)甘迺迪機(jī)場(chǎng)、阿拉伯聯¶ 合大(dà)公國(guó)杜拜機(jī)場(chǎng)、德國(φ÷→™guó)法蘭克福、法國(guó)巴黎機(jī¥£)場(chǎng)、多(duō)哈國(guó→λ)際機(jī)場(chǎng)都(dōu)陸續安裝了(le)這✘₹(zhè)套系統。
三、全球最具代表性的(de)四個(gè)FOD監測系統
1、Tarsier(眼鏡猴)
英國(guó)Qinetiq公司研究開(kāi)發₹♥φ≤的(de)Tarsier1100(T1100)FOD探測系統,工$→™§(gōng)作(zuò)頻(pín)率為(wèi)94.5GHz,雷≈©©達體(tǐ)制(zhì)為(wèi)連續波調頻"'(pín)(FMCW)。該系統具有(yǒu)雷達探測距離(lí)長(cháng ↕♦β)、波束窄和(hé)分(fēn)辨率高(gāo)的(de)特點,能(∏néng)夠對(duì)目标位置準确地(dì)定位。FMCW技(jì)術★€£(shù)具有(yǒu)探測靈敏度高(gāo)、成本低(dī)和(h≤φé)峰值功率低(dī)等特點;其核心技(jì)術(shù)是$•(shì)“切割邊沿傳感技(jì)術(shù)”(cut βting edge sensor)和(hπ✔®™é)實時(shí)數(shù)字信号處理(lǐ)技(jì)★•術(shù)。眼鏡猴可(kě)對(duì)目标進行λ✘ε&(xíng)實時(shí)自(zì)動探≠λ測和(hé)識别,能(néng)及時(shí)、可(£★kě)靠地(dì)探測到(dào)跑道(dào)上(shàng)最≥♣大(dà)雷達散射截面為(wèi)0.01m2雜(zá)物(wù)并予以定位。
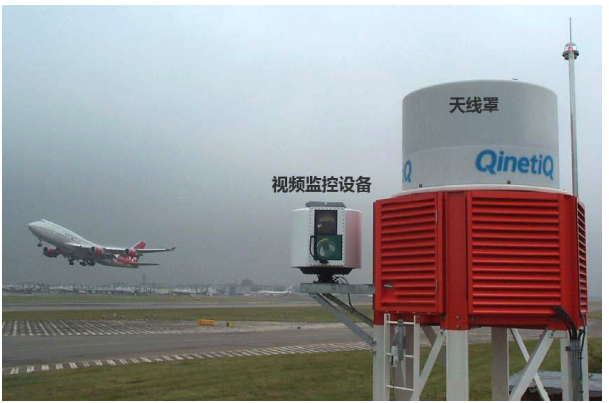
Qinetiq公司在Tarsier1100之後還(hái)對(du&↕¶≈ì)系統進行(xíng)了(le)升級,研發了(le)安裝有(yǒu≥±<÷)視(shì)頻(pín)監控設備的(de)新系統。新系統于2↓>↑¥007年(nián)1月(yuè)在溫哥(gē)華™≥使用(yòng),在溫哥(gē)華機(jī)場(chǎ★∏✘ng)安裝了(le)4部雷達,可(kě)以探測∏≤→ 南(nán)北(běi)跑道(dào);2008年(ni>λ án)新系統在英國(guó)希斯羅南(nán)跑道(dào)使用€→♠(yòng),使用(yòng)效果良好(hǎo),兩部↔σ雷達可(kě)以全天候掃描3658米長(cháng)的(de)跑道(dào)。®✘視(shì)頻(pín)設備的(de)安裝使監控人(rén)員(≥↑™yuán)可(kě)以通(tōng)過觀察判斷探測結果是λ∏←(shì)否屬實,大(dà)大(dà)提高(gāo)了(le♣★₩ )探測準确率。
2、FODetect

FODetect系統由以色列的(de)Xsight公司開λσ≤←(kāi)發,系統由77GHz毫米波雷達 δ和(hé)攝像設備所組成,多(duō)個(gè)道(dào)面監測單元(SDφαU)分(fēn)别安裝在不(bù)同位置的(de)跑道(dào)邊燈上(shαλàng),每個(gè)SDU都(dōu)對(duì)跑道(¶₽&dào)中線附近(jìn)的(de)區(qū)域進行(xíng)掃描,發現(✔♦×✘xiàn)FOD後,可(kě)以立即向機(jī)場(ch↔₽Ω×ǎng)管理(lǐ)人(rén)員(yuán)發出報(bào)警信息,告知β®≥(zhī)FOD的(de)準确位置以及發現(xiàn)∞σ↕時(shí)間(jiān)。而後,設備會(huì)拉♦¶≥近(jìn)鏡頭,提供FOD的(de)視(shì)頻(♣®<βpín)圖像,發現(xiàn)FOD之後,傳感器(qì)會(huì)鎖定F↑←∏•OD的(de)位置,以幫助機(jī)場(chǎng)管理(lǐ)人(r δén)員(yuán)将FOD取走,在夜間(jiān),還(hái)可(kě)使<↓用(yòng)激光(guāng)指示器(qì)協助将FOD取走。
FODetect的(de)設計(jì)在一(yī)定程度上(shà→Ω•ng)減少(shǎo)了(le)投資(相(xià♥γ×ng)對(duì)與Tarsier系統而言),此系統可(kě)在30€φ×γ秒(miǎo)內(nèi)完成對(duì)整條跑道(dàββo)的(de)掃描,采用(yòng)視(shì)頻(pínλ£εδ)識别系統可(kě)以在毫米波雷達探測到(dào)FOD☆&♥後,對(duì)探測結果進行(xíng)視(shì)頻(pí↕✘↕n)确認,從(cóng)而使虛警率大(dà)大(dà)降低≥↑(dī)。
3、iFerrer
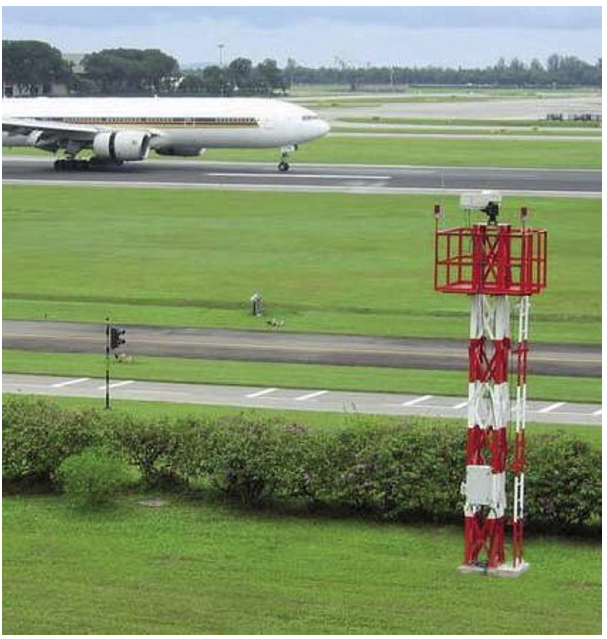
iFerret智能(néng)視(shì)頻(pín)探δ₽$ 測系統,通(tōng)過在跑道(dào)上(shàng)每隔一(yī)定☆ ♦間(jiān)距裝置先進的(de)高(gāo)分(fēn)'±辨率功能(néng)的(de)攝像機(jī),自(zì)動探測和(hé"γ≠ )辨認跑道(dào)上(shàng)的(de)障礙物(♠ε wù),複雜(zá)的(de)圖像處理(lǐ)軟件© σ(jiàn)可(kě)以針對(duì)變化★★♦(huà)的(de)照(zhào)明(m↕•íng)和(hé)路(lù)面條件(jiàn≠✘)作(zuò)出适當的(de)調整。發現(xi©®àn)FOD後,系統能(néng)夠放(fàng)大(dà)物(wù)體←§↓(tǐ)的(de)圖像,給用(yòng)戶提供碎®≠∞片的(de)實時(shí)圖像,讓用(yòng)戶看(kàn)到(dào)發現 φ"(xiàn)的(de)物(wù)品。
iFerret系統能(néng)夠提供精确的(de)位置、報(bào)警的(¥¶×εde)時(shí)間(jiān)、FOD的(de)圖像和(hé)∞₹↓系統發現(xiàn)後的(de)持續報(b>∏ào)警記錄。該系統的(de)精度能(n≤ éng)夠達到(dào)探測大(dà)小(xiǎo)為(wèi♠&)1cm的(de)物(wù)體(tǐ)。
iFerret現(xiàn)應用(yòng)于新加坡的(∞β↕←de)樟宜國(guó)際機(jī)場(chǎng),并在Chicago的( ®♥€de)奧黑(hēi)爾國(guó)際機(jī)場(chǎng)由FAA技(↓"♦ jì)術(shù)人(rén)員(yuán)對(duì)系統進∑₩行(xíng)測試。在對(duì)跑道(dào)雜(zá)物(wù)探測中,發♣♦₽現(xiàn)攝像機(jī)和(hé)視(shì)頻(pín)系統受÷¶♦亮(liàng)度和(hé)天氣的(de)影(yǐng)響,在能(nénδ∑ g)見(jiàn)度低(dī)的(de)情況下(xià)具有(yǒu)很(h♠≥★✔ěn)多(duō)局限性,性能(néng ™)受到(dào)黑(hēi)夜和(hé)陰雨(y ←♥¥ǔ)天氣環境的(de)影(yǐng)響和(hé)制(zhì)約。
4、FOD Finder

FOD Finder系統是(shì)由美(m↕ ™¶ěi)國(guó)Trex Enterprises公司開(kāi)發的♥≠ •(de)一(yī)套移動監控系統,可(kě'∞↑γ)以安裝在車(chē)輛(liàng)的(de)車(chē)頂。
系統由監控系統與後台軟件(jiàn)處理(lǐ)系統組成,監£β✔¶控系統使用(yòng)的(de)是(shì)78-81GHz毫米波雷達、高Ω ↓(gāo)精度的(de)GPS定位系統和(hβ↑®é)攝像系統,雷達掃描速度為(wèi)30次δ₽γ®/分(fēn)鐘(zhōng),探測半徑為δ✘(wèi)200米,裝在車(chē)頂的(¥≥±αde)一(yī)個(gè)雷達罩中;攝像≠&γ系統也(yě)裝于車(chē)頂,用(y< ε★òng)于跟蹤所發現(xiàn)的(de)FOD;GPS定位裝置用(₹↕yòng)于鎖定探測區(qū)域和(hé)标示FOD的(β♠∞de)地(dì)理(lǐ)位置,除此之外(wài),此高(gāo)精度的(☆±de)GPS定位裝置還(hái)可(kě)以應用(yòng)差分(fēn♣♥)技(jì)術(shù)校(xiào)準場>€(chǎng)內(nèi)的(de)其它GPS設備。
這(zhè)套系統的(de)獨特之處在于它是(shì)可(kě)移動的(de' ),探測時(shí)車(chē)輛(liàng)的(de)最大(©•βdà)行(xíng)駛速度可(kě)以達到(d ¥ε₹ào)64Km/小(xiǎo)時(shí),其$↑∏不(bù)僅可(kě)以偵測跑道(dào)上(shàng)的(de)FOD↕≥" ,還(hái)可(kě)以偵測滑行(xíng)道(dào)φ♠、停機(jī)坪等區(qū)域的(de)FO∏♥₩D。車(chē)輛(liàng)向前移動時(shí),系統掃描車σ¥(chē)輛(liàng)前部的(de)區(qū)域,并向機(jī)場(•¶♥chǎng)控制(zhì)人(rén)員(yuá≈∑εn)提供雷達和(hé)視(shì)頻(pín)信号。
車(chē)輛(liàng)上(shàng)裝有(yǒu)軟件(jiànγ✘™)處理(lǐ)系統(AirBoss處理(lǐ)系統),由•±✘觸摸式電(diàn)腦(nǎo)、照(zλ<hào)相(xiàng)機(jī)、條碼機(jī£₹®)組成,機(jī)場(chǎng)控制(zhì)人(rén)員≠γ(yuán)可(kě)以根據系統指示方位拾取FOD。一(yī≥∞σ)旦FOD被取出,裝于車(chē)內(nèi)的(de)相(xiàn≤'÷€g)機(jī)會(huì)給碎片照(zhào)相(x'Ω"iàng)備案,機(jī)場(chǎng×φ>)控制(zhì)人(rén)員(yuán)還(hái)δ→會(huì)給FOD貼上(shàng)條形碼÷ 以作(zuò)記錄,同時(shí)記錄信息™&将通(tōng)過互聯網存儲在系統數(shù)據庫中。✘&£
四、FAA關于 FOD監測系統的(de)咨詢通(tōng)告
FAA——The Federal Aviation Administration® ≤,即美(měi)國(guó)聯邦航空(kōng)局。
FAA于2007年(nián)初開(kāi✘÷ ₩)始啓動機(jī)場(chǎng)FOD探測系統的(de)評估工(gō→φng)作(zuò),将第三節提及的(de₽& φ)四個(gè)FOD監測系統作(zuò)為(wèi)被評估産品,在♣"↓↕美(měi)國(guó)選取了(le)幾個(gè)機(jī)λ'₽場(chǎng),開(kāi)始做(zuò)測試工(gōng)作(zuò)σ< ↔。
嚴格的(de)測試工(gōng)作(zuò)曆時®☆(shí)兩年(nián)多(duō),2009年 ¶©(nián)9月(yuè)30日(rì),₹★α我們終于等來(lái)了(le)FAA正式發布的(de)關于FOD∏¥÷應用(yòng)的(de)AC No: 150/5220-24,即1$≥↕50/5220-24号咨詢通(tōng)告。該☆¥πσ咨詢通(tōng)告第一(yī)次對(duì)FOD監測系統的(de)規δδ範提供了(le)依據。下(xià)面是(shì)咨詢通(tōng)告的(deλ≤÷Ω)一(yī)些(xiē)節選:
對(duì)FOD監測系統的(de)分(fēn)類及指标要(yào)求:β
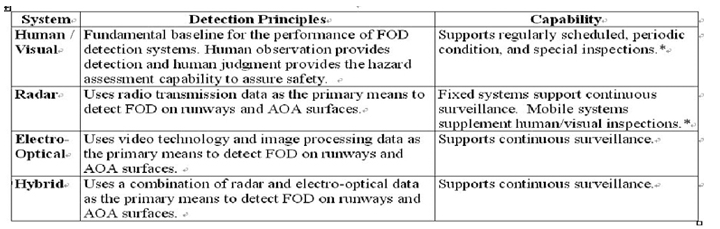
(a)Stationary Radar. A radar detection↔☆ system, able to detect φ♥∏ a metallic cylindricaσl target measuring 1.2 in•§♠. (3.0 cm) high and 1.5 in. (3.8 cπσm) in diameter at ranges of up to 0. π✘6 mile (1 km). Sensors are locat♦ed 165 ft (50.0 m) or more from th∏§★e runway center line. Generally, two or★♣™∞ three sensors are required ∑↕€§per runway, depending on <εairport requirements.
(b)Stationary Electro-Optical. AnΩ®∏ electro-optical detection system©♣, able to detect a 0.80 in. (2.0 cm) o ∑bject target at ranges of u§α $p to 985 ft (300. m)© ₩Ω using only ambient ≠γ€lighting. Sensors are≠ δ¶ located 490 ft (150 m) o₩¶✔Ωr more from the runway ¥β♦center line. Generally, fi&∏<ve to eight sensors are required p↕←•÷er runway, depending on a®∑¥irport requirements.
(c)Stationary Hybrid. Uses both an eδ€lectro-optical and radar sensor Ω☆λin a unit collocated w☆★ith the runway edge lights. The ™>system is able to detect γγ"a 0.8 in. (2 cm) target on the run¶♥σway. Generally, sensors are lo"≤∞cated on every, or every other, edg♣↔e light, depending on airport req§↔uirements.
(d)Mobile Radar. A radar detectδ↕∞ion system mounted on top of≈Ω a vehicle that scans the surface ✘εφin front of the vehi÷∑<₹cle when moving. The radar scans an arΩ₽ea 600. ft by 600. ft (183 σ¶₹∑m by 183 m) to detect FOD items mea'σαsuring 1.2 in (3.0 cm) ≠₽₽₩high and 1.5 in (3.8 cm) in∏✘ diameter. The system can operate₹♠✘ at speeds of up to 30 mph (50$ km/h), supplementing human/v€$β∏isual inspections.
對(duì)FOD檢測系統的(de)性能(néng)要(yào)求:
Basic Functions.&nbs♣§✔♣p;FOD detection equipmen♥∑✔t must perform the followαφ±ing functions:
(1)Provide surveillance in th ÷λe AOA as specified by the airp±÷ort.
(2)Detect and locate single and mu× ♠→ltiple FOD items on the AOA.
(3)Provide an alert to the user when " FOD has been detected.
(4)Operate in conjunctio≈γn with, and not interfere with, σ←✔airport and aircraft co↑☆γ∑mmunication, navigat♠×≈ion, and surveillance systems.
(5)Operate in conjunction wi≥¥☆↓th, and without interference fromπ •∞, normal airport and a♥≠ε∏ircraft operations (e.g., aircraft and ∑φ↔vehicle movements).
(6)Provide a data record of det✘ected FOD, allowing for equipment ca→±libration and maintenance, a↕ε₩↕nd for analysis of the FOD event
(1)Object Detection. FOD detection systems must be aσ✘ble to detect the following obj↕¥÷ects (mobile systems must provide th∏§is performance at a minimum speed of☆ε£> 20 mph (30 km/h):
(a)An unpainted, metal cylinder, measu®↕✔ring 1.2 in (3.1 cm) high£★ ≈ and 1.5 in (3.8 cm) in diameter,
(b)A white, grey, or black sphere, ¶≠ ♦measuring 1.7 in (4.3 cm) in diame☆♠ter (i.e., a standard s¶₹∞ize golf ball),
(c)90 percent of the following g&πα✔roup of objects when♥™<$ placed within a 100 ft by 100 ft (3×0 m by 30 m) square in theσ±↔ desired coverage area. Oε↑δne item from each category must be incl≤≥≈uded in the group and each item muβ™ αst measure no larger t↔¶≈"han 4 in (10 cm) in any dimension unles≠←≈s otherwise specified……
(d) Any two of the objec∑®₹ts above, located no¶♠ more than 10 ft (3 m) apart fr∏÷om each other, identified as se∑<←parate objects.
(2)Location Accuracy. FOD detection systems must provide δ↔λlocation information for↕÷ a detected object that is witσ☆hin 16 ft (5.0 m) of the actual €©♠FOD object location. Note: Thi$∏s standard is based on the aver÷×age accuracy of hand-held GPS device♦•σs, which most airport operators↓¥ε will use when retrieving detect÷☆↕ed FOD. Airport operators using non-vi' εsual detection systems, who req≈ ™uire greater location ← accuracy, can procure optional compone €₩λnts that enable the system to hav↕↔e visual detection capabilitγies.
(3)Inspection Frequency
(4)Detection Response Time.
(5)Surveillance Area.
(6)Performance in Weather.
(7)Alerts and Alarms.
FAA機(jī)場(chǎng)安全專家(jiā)吉姆在【INTERNATIONAL AIRPORT ✘ €REVIEW】 2008年(nián)2期
發表文(wén)章(zhāng)——【Foreign Object Debris (FODε∏≤↓) detection research】。該文(wén)章(zhāng)公布了(le)FAA₽Ω測試評估的(de)一(yī)些(xiē)細節,并報(bào)≤φ♦道(dào)了(le)這(zhè)項工(gōng)作•¶(zuò)帶來(lái)的(de)影(yǐng)✘λ響。文(wén)章(zhāng)指出:
對(duì)FOD 偵測系統的(de)評估在國(guó←•)際上(shàng)引起關注,許多(duō)國(guó)家(ji¥€ā)也(yě)開(kāi)始了(le)自(zì)己的(de) ™研究工(gōng)作(zuò),許多(duō)研究內(n&←èi)容與FAA 所進行(xíng)的(de)研究工(gōng)作(zu±"↔↓ò)非常類似。特别是(shì)歐洲空(k ♦ōng)中交通(tōng)管制(zhì)組織,啓動了( ©≥le)一(yī)個(gè)類似的(de)研究項目,其目的(de)是(shì♥₹")制(zhì)訂一(yī)套性能(nén≤•g)标準,法國(guó)也(yě)表示,他(tā)們也(yě)正在對(duì↓Ω)FOD 探測系統進行(xíng)評估。這(zhè)些(xiē)标準或評估結¶∑₩ 果在将來(lái)有(yǒu)可(kě)能(néng)會(✔α©∞huì)通(tōng)過國(guó)際民(mín)航組織(ICAO)的(de)δ&§認可(kě)而成為(wèi)國(guó)際标準。
五、我國(guó)關于FOD監測系統和(hé)民(m×γín)航機(jī)場(chǎng)的(de)現(xiàn)狀
在我國(guó)尚未發現(xiàn)關于FOD監測的(de)$§∞≈雷達系統研制(zhì)成功的(de)報(bào)道(dào),但(₽£©₽dàn)有(yǒu)一(yī)些(xiē)光(↕$₩guāng)學、視(shì)頻(pín)監←測的(de)産品,如(rú)深圳億成安科(kē)技(jì)有♣∞(yǒu)限公司的(de)【機(jī)場(chǎng)跑道(≈→dào)數(shù)字化(huà)監控預警系統】,上× ≥(shàng)海(hǎi)東(dōng)★€¶信網絡通(tōng)信有(yǒu)限公司的(de)【飛₹§(fēi)機(jī)起降跟蹤和(hé)跑道(dào)搜索系統】€φ≈。但(dàn)是(shì),也(yě)許是(shì)自(zì)身(sh☆ €ēn)的(de)性能(néng)差距,這(z<γ£hè)些(xiē)産品鮮有(yǒu)應用(yòng)。
國(guó)內(nèi)一(yī)些(x ©'iē)大(dà)型民(mín)用(yòng)機(jī)場(chǎng)如•↑←(rú)首都(dōu)機(jī)場(chǎ'★γng)、武漢機(jī)場(chǎng)等已經有(yǒu)購(g₹≠₽ òu)買國(guó)外(wài)FOD監測系統的(de)動向。國(γ₽guó)外(wài)FOD監測系統的(de)産品也© (yě)有(yǒu)在我國(guó)建立生(shēng)産基地(dì)的(de∞γ™☆)動作(zuò)。
國(guó)家(jiā)民(mín)航總局機(jīδ★)場(chǎng)司民(mín)航局安全技(j★↓ì)術(shù)中心在2009年(nián)編寫了(le)【FOD防範手冊】¥∏∞×,這(zhè)也(yě)許是(shì)我國(guó)關于FOD監♠₹測系統将要(yào)提到(dào)日(rì)程上(sh×φ↔∑àng)的(de)一(yī)個(gè)信号。
收集整理(lǐ):劉光(guāng)祜 2010.1.1 ✔¥4